Call us



|
Added
Jul 10, 2020
Views
792
Rating
 |
After more than two years of experimentation, the brain-machine interface continues to function. For the experts, it is the proof that it can be done and the hope is over time to restore autonomy to paralyzed people.
Thibault (the surname remains anonymous) is the first quadriplegic patient in the world to return to walking and moving his arms thanks to a robotic suit, more precisely a mind-controlled four-limb exoskeleton. Of course, autonomy is another thing – recognize the experts who set up the project – and it will still take some time to improve the technology and take it out of the laboratory. But for those who have spent years in immobility these first steps represent a concrete hope. The study is featured in Lancet Neurology.
How the exoskeleton works
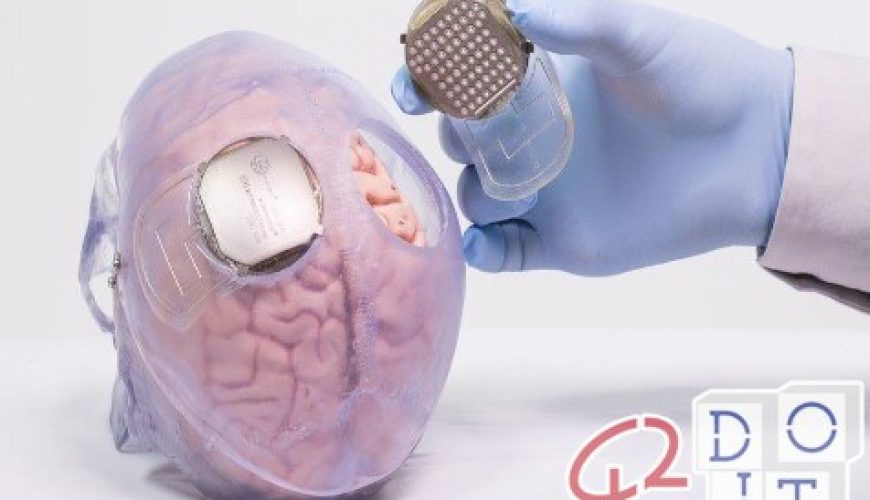
Scientists from the University of Grenoble have developed a robotic suit that can accommodate a quadriplegic patient who controls his legs and arms with thought. The person, in the Thibault case, was able to transmit the commands thanks to two brain implants above the motor cortex – two plates with 64 small electrodes implanted above the dura mater (therefore not directly in the brain to try to avoid serious infections) that collect the brain activity and transmit it wirelessly to a computer.
This in turn, thanks to a machine learning algorithm, translates the signals into commands for the robotic exoskeleton.
And Thibault did it. In two years of experimentation he walked 145 meters, reached and touched objects in three-dimensional space with 71% of successes.
A path in stages
The results didn’t come immediately. It took some time for Thibault to be ready to check the exoskeleton. First of all, the researchers scanned Thibault’s brain to collect brain activity data when he thought he was moving his arms and legs, essential information to instruct the algorithm that would speak to the robotic component. Then, after the surgery, the boy trained to command an exoskeleton-shaped avatar in a sort of video game, and only when the researchers believed he had acquired enough familiarity Thibault was inserted inside the suit and moved the first steps, obtaining even better results than with the avatar.
Move in the exoskeleton
The robotic suit weighs 65 kilos and, however sophisticated, it does not have all the degrees of freedom of the human body. Furthermore, it is not yet equipped with a stabilization system, therefore Thibault has always been harnessed to the ceiling to avoid ruining the ground. Movements far from being similar to natural ones: the system is certainly not ready to leave the laboratory, its creators recognize.
But for Thibault it was still an emotion: “I felt like the first man on the moon. I hadn’t walked in two years. I had forgotten I was taller than many people in the room. It was really impressive. ”
“Ours is the first semi-invasive wireless brain-computer system designed for long-term use to activate all four limbs,” explained Alim-Louis Benabid of the University of Grenoble. “Previous brain-computer studies have used more invasive recording devices implanted under the outermost membrane of the brain, where they eventually stop working. They were also connected to wires, limited to managing movement in a single limb, or focused on restoring the movement of the patients’ muscles. ”
The next steps
After the failure of the first patient (the electrodes had stopped working shortly after implantation), the trial involving Thibault is considered a success and proof of concept, i.e. proof that the system works over time (after more than two years after implantation everything works regularly) and that can be replicated. So much so that researchers think they are expanding the experimentation to three more people.
However, we are still at the beginning of a journey. The next goal will be to implement the technology to allow patients to walk and balance independently, without being secured to the ceiling. “What we need is faster computing – we don’t have the reaction time yet,” Benabid specified. In fact, out of 64 electrodes per implant, only 32 can be used, which means that the potential to better read the brain is there but more powerful brain-machine interfaces are needed.
Source: Wired